


Un projet soutenu par l’office fédéral de l’agriculture (OFAG) en partenariat avec la haute école des sciences agronomiques, forestières et alimentaires (HAFL)
Lorsque nous avons défini la planification pour l’année 2020 avec de nombreux tests agronomiques, nous nous attendions à ce que notre robot AVO rencontre certains obstacles mais aussi de belles victoires. Le projet HAFL fût l’une d’elles car dans le processus du fonctionnement global du robot, nous avons pu valider certaines fonctionnalités et obtenir un résultat d’étude extrêmement encourageant.
Décryptage d’une étape importante dans le développement de notre technologie.

Au printemps dernier, nous avons eu la chance d’effectuer un projet pilote avec notre partenaire HAFL. Dans les objectifs prédéfinis pour ce test nous retrouvons notamment:
- Comparaison de la technologie d’AVO à celle d’un désherbage conventionnel
- Évaluation de l’efficacité du système de reconnaissance des plantes
- Examiner la précision du dispositif de sprayage
Description
- Localisation : Aarberg (BE)
- Date : Juin 2020
- Variété de betterave : Smart Belamia
Pour ces essais, 3 modalités de traitement ont été considérées, soit:
- M1 – Traitement herbicide en plein (application traditionnelle)
- M2 – Traitement herbicide en bande couplé à des passages d’AVO
- M3 – Traitement herbicide effectué uniquement avec AVO
Afin d’évaluer l’efficacité des différentes approches, des relevés de la flore adventice ont régulièrement été réalisés par notre partenaire.
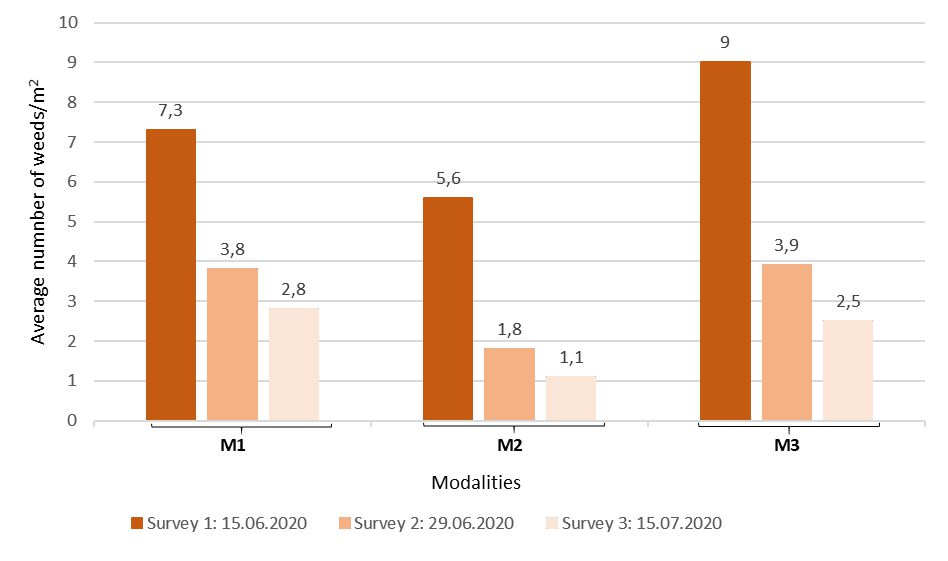
Résultats d’étude
Les résultats présentés dans le tableau ci-dessus démontrent une bonne performance globale en matière de stabilité et de taux de détection du dispositif de pulvérisation. Les valeurs obtenues permettent une validation de la partie algorithmique et mécatronique en conditions de terrain !
Pour l’ensemble des essais réalisés, les modalités correspondant à une utilisation complémentaire (M2) ou totale de notre technologie (M3) ont démontré des résultats comparables à une application traditionnelle (M1). Ces résultats mettent également en évidence des économies substantielles d’herbicides.
Le travail continue pour nos ingénieurs afin d’optimiser la vitesse d’avance du robot ainsi que l’efficience du sprayage. L’un des enjeux majeurs est d’obtenir une régularité des performances du robot dans tous types de terrain et indépendamment des conditions météorologiques.
À ce jour, les validations algorithmiques et mécatroniques nous permettent d’utiliser notre technologie derrière un tracteur évoluant à 8km/h.




